2. Avanzar y Retroceder#
Necesito programar un robot que se mueva hacia adelante, se pare 2 segundos y luego retroceda la mitad de lo que ha avanzado. Es decir, no queremos que llegue a la situación de inicio, sino que se pare a medio camino.
Nos da igual la velocidad y la distancia, queda a criterio del programador.
Solución
Aunque es muy sencillo, el algoritmo nos obliga a tener en cuenta varios pasos:
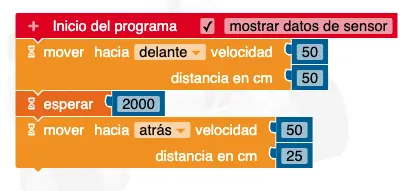
Avanzar hacia adelante. Vamos a suponer 50 cm a velocidad 50.
Parar 2 sg. Los valores han de estar en milisegundos, es decir, el valor a poner en el bloque de «parar» o «esperar» será de 2.000
Avanzar hacia atrás, 25 cm (la mitad) a la misma velocidad (50).
El bloque «esperar» está en el menú de «control» (no es una acción propiamente dicha). El programa de bloques es el siguiente:
El escenario de la simulación, en este caso, tampoco influye.