4. Avanzando con la programación#
Preguntas
¿Todos los programas son lo mismo? ¿Cuántos bloques debe tener mi programa? ¿Cómo resuelves un reto que no hayas realizado previamente?
4.1. El mundo simulado del robot#
Los robots, aunque se mueven en el mundo real, no ven el mundo real. Funcionan en un mundo virtual, un mundo simulado. En el caso de ORL se pueden usar, crear y modificar mundos simulados en base a unas escenas precargadas (imágenes de fondo).
ORL tiene de forma predeterminada algunas escenas que puedes cambiar usando el botón «Cambiar la escena». Estos escenarios dependen del tipo de robot (en nuestro caso EV3dev). El robot es el mismo, el programa es el mismo, pero puedes cambiar su mundo simulado. Por ejemplo estos 4:
|
|
|
|
Como ves, un escenario no es más que una imagen. Como si fuera un mapa del mundo simulado en el que se moverá el robot.
Y sobre ese mundo simulado, podemos colocar diferentes figuras geométricas (cuadrado, rectángulo y círculo) para:
Añadir obstáculos. El robot detecta obstáculos (necesita un sensor), pero no lo puede atravesar.
Añadir zonas de color. El robot detecta el color (según los sensores que tenga) de las zonas por las que pasa.
Y así, puedes generar diferentes mundos simulados para que tu robot interactúe. El límite está en tu imaginación. En proyectos STEAM te permite simular el mundo real creando mundos simulados según tus necesidades. Pero tendrás que hacer una equivalencia entre el mundo real que quieres simular, y las herramientas de simulación que te da el software (en este caso figuras geométricas que o son obstáculos o zonas de color). Además tienes el límite del escenario (los bordes), que de por sí es un obstáculo.
Actividad S04-A01. Crear un mundo simulado
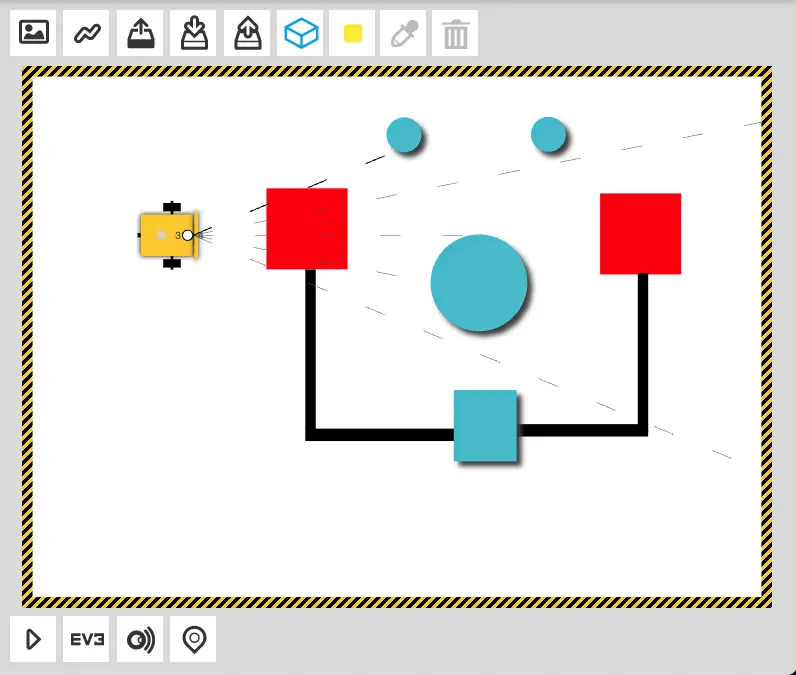
En esta actividad tendrás que crear el mundo simulado que se muestra a continuación. La imagen de fondo (escenario) es uno de los predeterminados de ORL para el robot EV3 (tendrás que seleccionar esa escena).
Solución
La creación del mundo implica jugar con el menú superior, dentro del simulador:
Seleccionar un escenario vacío, sin imagen de fondo.
Colocar varios obstáculos (tres círculos y un cuadrado)
Colocar dos zonas de color rojo (cuadrados rojos)
Colocar unas líneas gruesas negras (he usado cuadrados disminuyendo su área, es aquí donde tendría sentido una imagen de fondo)
Es una actividad creativa, que puede ser de utilidad para los estudiantes.
4.2. Acciones y Sensores#
En los primeros 5 retos hemos podido ver algunas de las acciones que se permiten con el robot EV3dev:
Avanzar y retroceder
Girar
Hablar
Pero realmente hay más, por ejemplo:
Parar
Reproducir tonos (de duración y frecuencia determinada)
Encender diferentes luces del robot
En el menú acciones verás qué cosas puedes hacer, según el robot que escojas.
Por otra parte, tenemos los sensores. Según vimos en El simulador, a la hora de configurar un robot, podemos configurar qué sensores tenemos disponibles. Algunos ejemplos los podemos ver en la siguiente imagen:
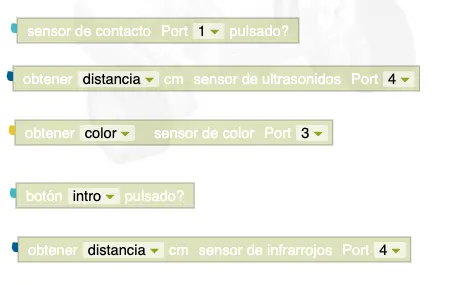
Hay que prestar atención al valor o acción que devuelve el resultado del bloque del sensor. Según la forma del conector del bloque y su color, se podrán utilizar de una forma u otra. Depende de cada tipo de robot y sensor.
Ten en cuenta que no todos los resultados de un sensor se pueden utilizar en cualquier lugar. La gran ventaja es que hay muchísimas posibilidades según el robot que se utilice.
Ten en cuenta la etapa educativa
Es muy importante tener en cuenta el nivel educativo de tu estudiante. Ojo a no plantearle conceptos demasiado complejos sin ir paso a paso.
Este material debería funcionar sin problemas para mayores de 14 años, y probable en mayores de 12. Pero nadie como el profesor para conocer a su estudiante. Porque una cosa es la edad cronológica y otra la edad «cognitiva».
4.3. Variables y Operaciones#
En la práctica, la programación tiene muchos conceptos en los que habría que profundizar. Pero en un contexto de iniciación, además de lo que ya hemos visto es bueno profundizar en dos conceptos importantes: las variables y las operaciones. Son dos aspectos importantes en cualquier lenguaje de programación y permiten resolver problemas más complejos. Veremos los aspectos más básicos y es un buen momento para iniciarse en su uso.
4.4. Variables y Valores#
Una variable es un identificador de un valor, un dato concreto. Y recuerda que un valor puede ser un número, un texto, un valor lógico (booleano). Es lo que llamamos el tipo del dato. Tres ejemplos:
5 es un valor, y su tipo de datos es número
«Hola, soy un robot» es un valor y su tipo de dato es texto. Es una cadena de texto, y lo sabemos porque lo ponemos entre comillas
Verdadero es un valor y su tipo de datos es booleano (lógico). Es un valor «especial» y sólo existen dos valores de ese tipo: Verdadero o Falso.
Una variable es como una caja en la que ponemos un valor. A esa variable le ponemos un nombre, que lo llamamos identificador, y siempre que pongamos el nombre (de la caja), es lo mismo que poner el valor. Es el equivalente a las variables que usamos en matemáticas. Por ejemplo
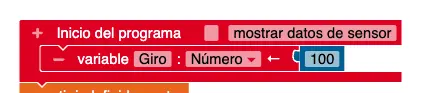
En este caso hemos usado una instrucción de asignación (un bloque especial), donde asignamos un valor a esa variable (Giro). Siempre que se use como Giro lo va a sustituir por el valor (número) que le hemos asignado (en este caso 100).
En el caso de ORL las variables del programa se añaden (y se asignan) al principio, dentro del bloque «Inicio del programa». Pueden ser útiles en muchos casos, generalmente para simplificar el uso del programa. Por ejemplo:
Para no repetir siempre un mismo valor
Para configurar un valor al principio y cambiar el comportamiento del programa
Para modificar el valor a lo largo del problema, según las necesidades del programa
4.4.1. Operaciones#
Y tanto los valores, como las variables, se utilizan en expresiones usando diferentes tipos de operaciones. Estas expresiones son operaciones sobre valores, los operandos, que dan como resultado un valor. Es el equivalente a una fórmula matemática. Estos son los tres grupos de operaciones más habituales:
las aritméticas: las habituales de sumar, restar, etc. Su resultado es numérico. Sirven para crear expresiones aritméticas.
las de comparación: mayor, menor, igual a. Su resultado es un valor lógico (Verdadero/Falso). Sirven para crear expresiones lógicas.
las lógicas. Su resultado es un valor lógico
Las operaciones lógicas (AND / OR) permiten obtener expresiones lógicas que son resultado de varias operaciones, es decir, es un cálculo especial de valores verdadero/falso. Generalmente construimos expresiones (fórmulas) usando diferentes operaciones. Veamos el siguiente ejemplo:

Se obtiene un valor del sensor de colores y se compara con un valor especial (un color). El resultado será Verdadero (el color que se obtiene del sensor es rojo) o Falso (no lo es).
Se obtiene la distancia a un obstáculo, desde el sensor de ultrasonidos y se compara con el valor 20 (cm). Si el valor es menor, el resultado es Verdadero.
Se realiza la operación lógica O (OR) que será Verdadero si uno de los dos es verdadero.
El resultado (verdadero o falso) se usa dentro de una instrucción que acepta este tipo de valor (técnicamente se llaman valores lógicos o booleanos).
4.5. Aprender a Programar (Practicar)#
Pero bueno, demasiada teoría en esta sesión. Vamos a ponerlo en práctica en estos dos retos similares, donde sólo cambia la condición de detección. Con esto, estaremos listos para el reto final.